Moniteur de vision SBS SM-3
Avec le SBS SM-2 Seeing Monitor, vous pouvez désormais analyser la qualité de l'observation de votre observatoire.
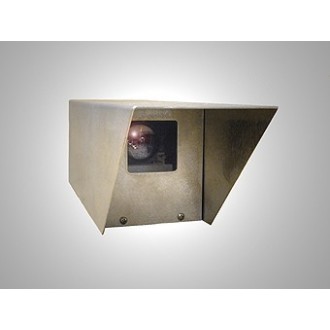
Le moniteur de vision SBS SM-3 utilise un capteur CMOS QHY à haute qualité et à faible bruit, un objectif 100 mm f/3,5 de haute qualité, ainsi qu'un logiciel personnalisé pour le moniteur de vision, écrit par le Dr Alan Holmes. Le Seeing Monitor contrôle en permanence la vision sur une période de 12 heures et affiche les mesures sur l'écran de l'ordinateur, enregistrant les données dans un fichier texte pour une analyse ultérieure. La caméra est montée dans un boîtier en aluminium résistant aux intempéries et doté d'une fenêtre de qualité optique pour la protéger des éléments. Une fois le couvercle retiré, la caméra peut être mise au point et le pointage peut être ajusté indépendamment. L'interface informatique est de type USB2 et un espace est prévu pour installer un prolongateur USB alimenté dans le boîtier en aluminium, sous ou derrière la caméra.
Détails du SM-3
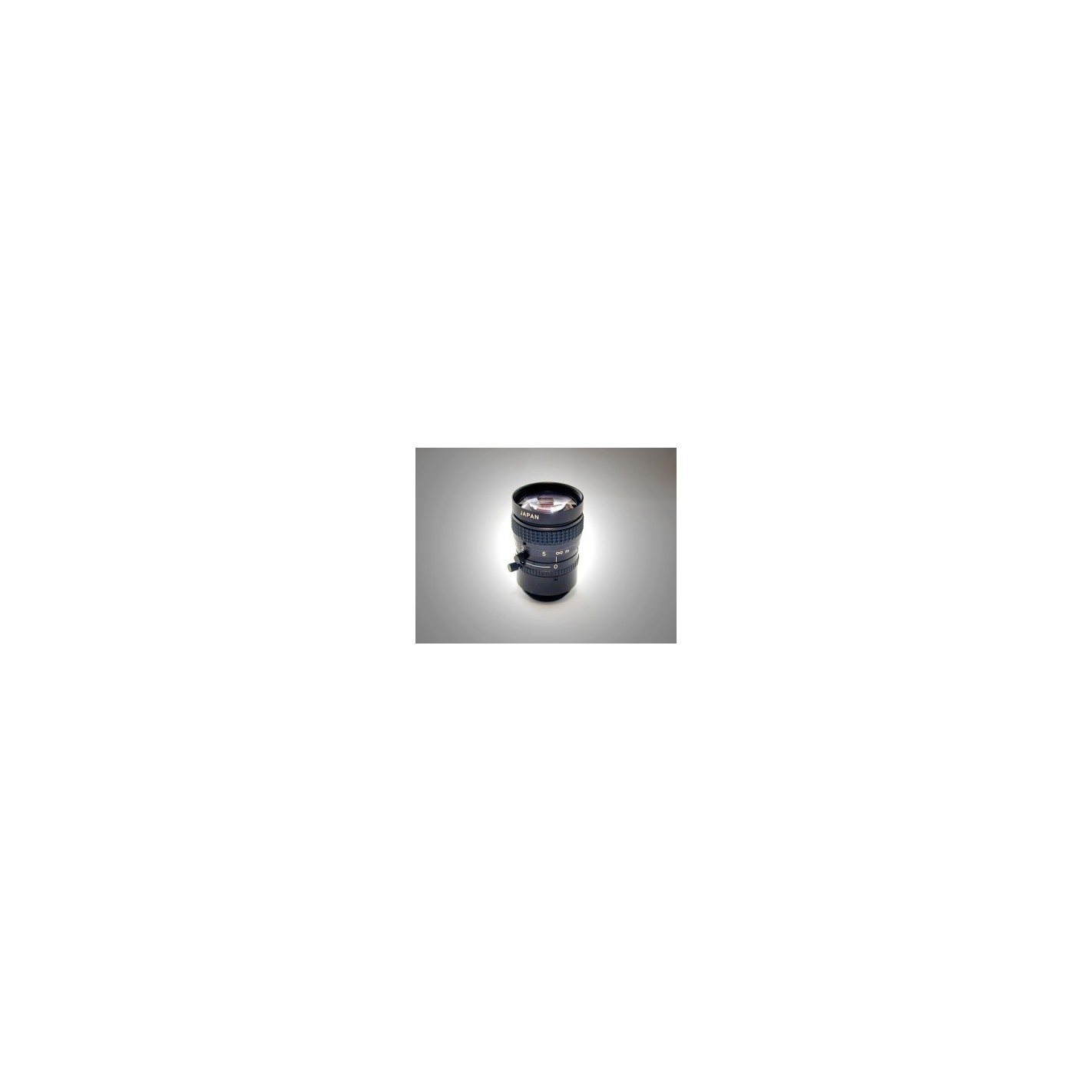
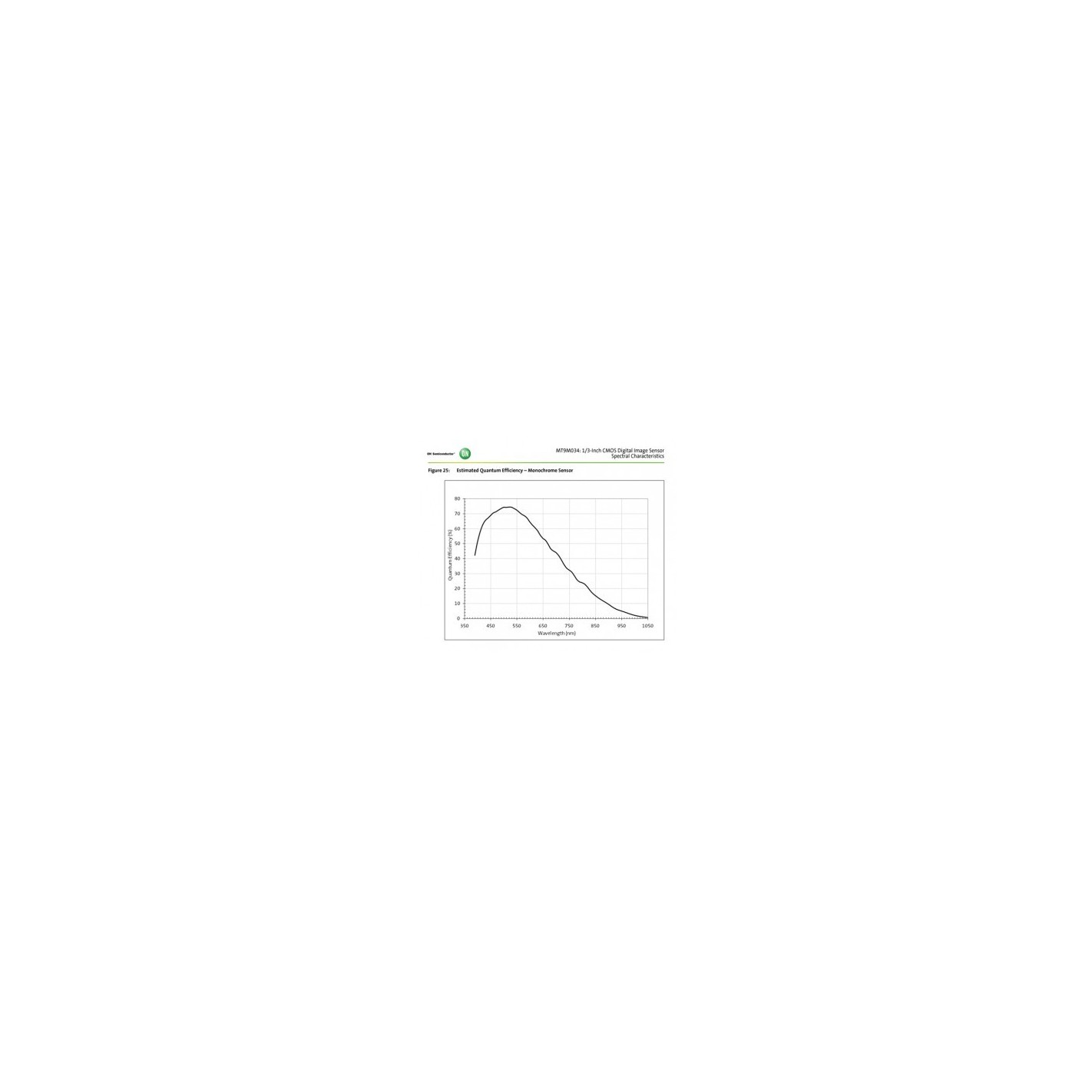
Le moniteur de vision SM-3 est essentiellement le même que le précédent SM-2, à l'exception du nouveau boîtier, des modifications mineures apportées aux réglages de montage interne de la caméra alt az et de la configuration du trou de montage inférieur. Pour le reste, son fonctionnement est identique à celui du SM-2. Le SM-3 continue d'utiliser la caméra QHY 5L-II, un CMOS MT9M034 de 1,2 mégapixel avec un QE exceptionnellement élevé (74 %) et un bruit de lecture exceptionnellement faible (~5e-). La fonction d'étalonnage FPN (Fixed Pattern Noise) intégrée au capteur résout l'un des principaux problèmes de la technologie CMOS, ce qui permet d'obtenir des images claires et uniformes, même à gain élevé. L'objectif est un objectif 100 mm f/3,5 à monture C de haute qualité fabriqué au Japon, idéal pour cette application.
Le moniteur de vision SM-3 est particulièrement utile pour ceux qui disposent d'une installation permanente, mais aussi pour ceux qui doivent s'installer tous les soirs pour prendre des images astro. En rapportant et en traçant la vision d'une nuit à l'autre et d'une heure à l'autre, l'utilisateur peut déterminer le moment optimal pour tenter de prendre des images à haute résolution et les moments où un équipement plus approprié pour des images à grand champ et à plus faible résolution pourrait être conseillé. Le Seeing Monitor intègre le matériel nécessaire dans un boîtier étanche et comprend un logiciel personnalisé. La vision est affichée en unités de la demi-largeur zénithale maximale (FWHM) en secondes d'arc attendue pour une image stellaire à longue exposition.

Théorie du fonctionnement
La plupart des observatoires professionnels utilisent la technique DIMM (Differential Image Motion Monitor) pour mesurer le seeing. Cette technique est mise en œuvre dans le matériel en utilisant un masque à deux trous sur une ouverture de télescope Schmidt-Cassegrain de 8 à 11 pouces, et en mesurant la fluctuation moyenne quadratique (rms) de l'espacement des deux taches observées lorsqu'une étoile brillante est imagée légèrement en dehors de la mise au point avec une caméra rapide. La raison pour laquelle on mesure deux taches est que le mouvement global des deux taches dû à un mauvais suivi ou aux vibrations du vent peut être rejeté. Cependant, le système qui en résulte est compliqué à automatiser et nécessite invariablement une enceinte automatisée pour abriter le télescope, ce qui porte le coût total à plusieurs milliers de dollars. L'un des problèmes de cette approche est qu'elle ignore complètement les courants du tube dans le SCT, qui ne sont ni petits ni corrélés sur l'ensemble de l'ouverture. L'approche utilisée avec le SBS Seeing Monitor consiste à utiliser un système fixe à ouverture unique regardant Polaris, monté sur un ressort lourd et solide. Cela permet d'éliminer les mouvements du vent et les erreurs de suivi. Polaris se déplace dans l'espace d'une mesure, de sorte que la dérive linéaire du centroïde de la position de Polaris est déterminée et corrigée. C'est ce que nous appelons la technique SIMM.
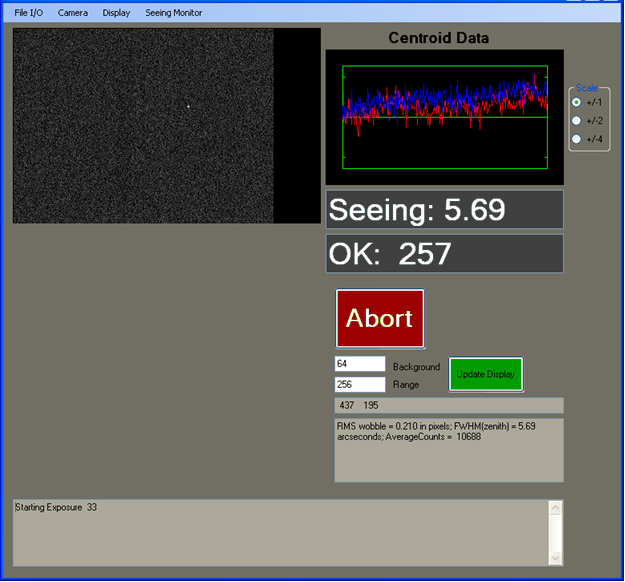
Une mesure précise de la vision nécessite des expositions de 0,01 seconde ou plus pour figer la vision et éviter les erreurs dues à la moyenne du mouvement de l'étoile sur une longue exposition. Dans le cas du SM-2, le logiciel recueille 256 images de la vision, chacune avec une exposition de 0,01 seconde. Le mouvement moyen de l'image est ensuite déterminé. La collecte et le traitement de 256 images prennent environ une minute. Un objectif de haute qualité (Fig. 1, ci-dessus) avec une longueur focale de 100 mm permet d'obtenir une précision inférieure au pixel pour le calcul du centroïde, et le mouvement de Polaris au cours d'une nuit peut être contenu sur le capteur CMOS avec une longueur focale de 100 mm. Au cours d'une nuit, Polaris peut se déplacer sur un arc de 180 degrés, et son mouvement doit donc être pris en compte dans tout plan de suivi à long terme.
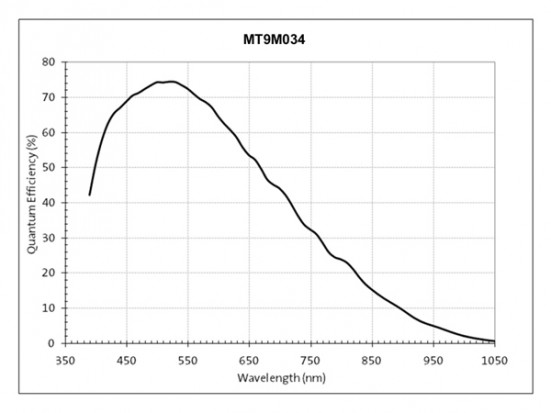

Figure 2 : Deux expositions additionnées du champ Polaris
À la latitude de Santa Barbara, Californie (35 degrés), le bruit de fond d'un SM-3 équipé d'un objectif de 100 mm est d'environ 0,6 seconde d'arc FWHM. Cette valeur est mesurée à l'intérieur, la nuit, en observant une DEL d'une luminosité comparable à celle de Polaris, que l'on fait avancer lentement dans une direction horizontale. Il faut comprendre que cette faible valeur ajoutera une valeur efficace à la vision réelle à de faibles niveaux. Ainsi, si un SM-3 équipé d'un objectif de 100 mm mesure une vision de 1,0 seconde d'arc, il faut soustraire le biais mesuré de 0,6 seconde (en valeur efficace) pour obtenir la vision réelle, soit 0,8 seconde d'arc. La conversion de la vision mesurée à l'altitude de Polaris en une valeur zénithale se fait à l'aide d'une formule bien acceptée, où la vision zénithale est égale à la vision mesurée pour Polaris divisée par la masse d'air à la puissance 0,6. La masse d'air est égale à 1 divisé par la masse d'air à la puissance 0,6. La masse d'air est égale à 1 divisé par la masse d'air puissance 0,6. La masse d'air est égale à 1 divisé par le cosinus de la quantité 90 degrés moins la latitude.
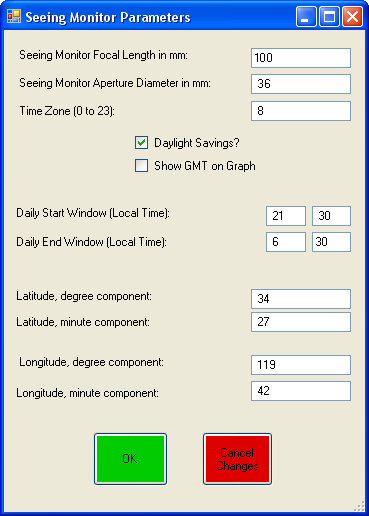
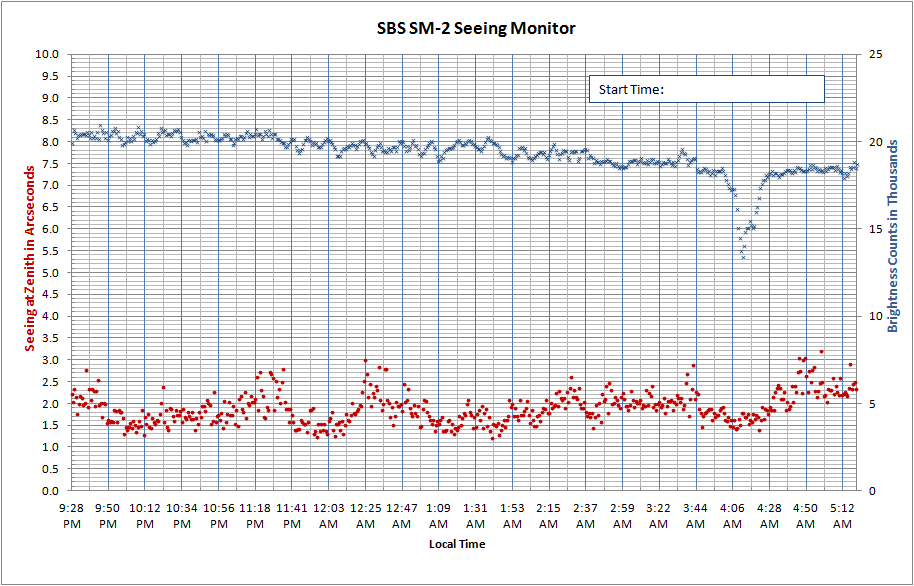
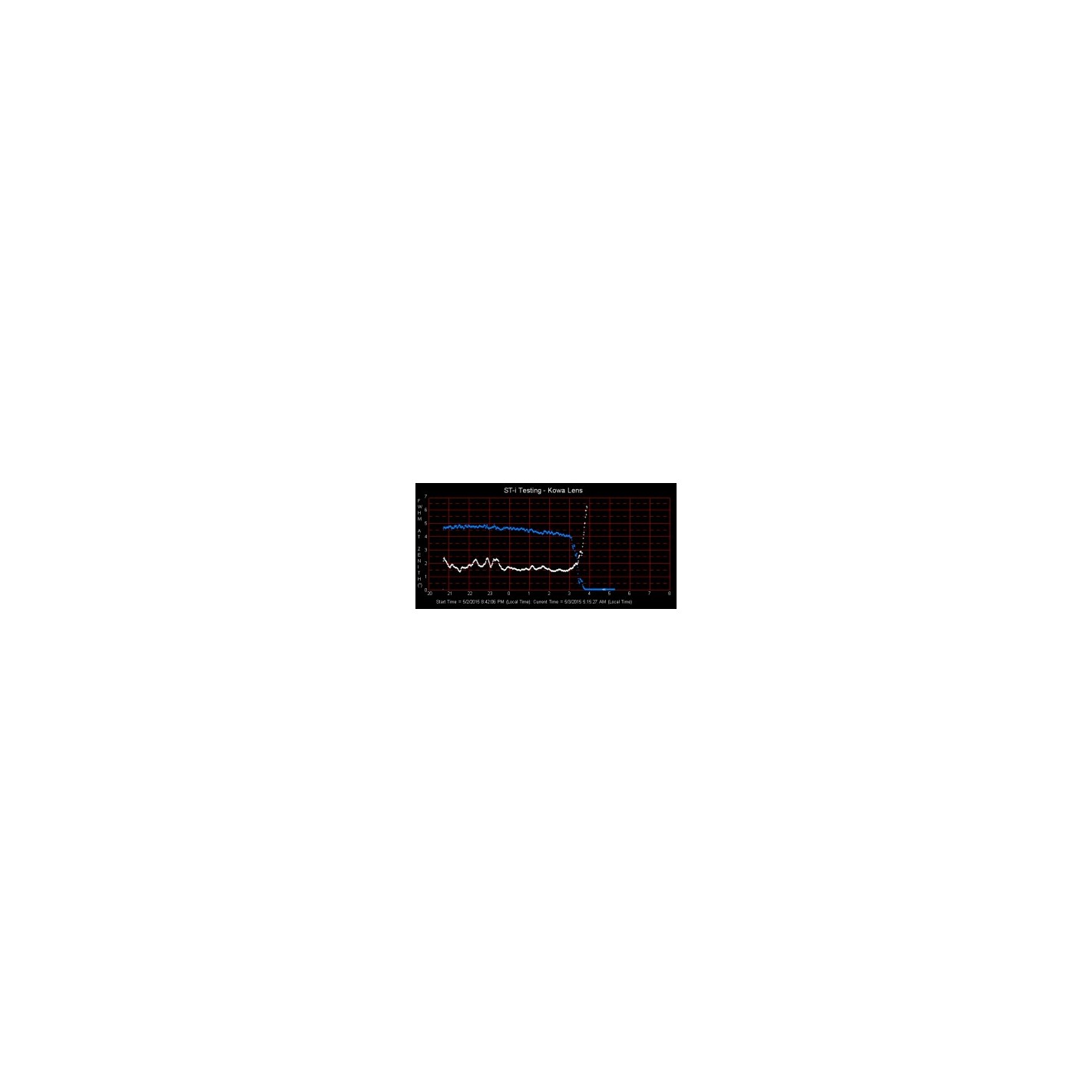
Menu du moniteur de vision : vous pouvez ici choisir de démarrer l'enregistrement de la vision immédiatement. Si vous souhaitez démarrer à une heure précise, sélectionnez Timed Based (Basé sur le temps) et le programme fonctionnera pendant la période indiquée. Lorsque l'enregistrement démarre, un graphique s'affiche, indiquant le zénith FWHM (full width half maximum of the star image), avec une heure de début correspondant au numéro de l'heure précédente, et montrant 12 heures de données. La durée de ce graphique est fixée à 12 heures. Le graphique et un fichier texte enregistrant les données d'observation seront écrits dans le répertoire C:SeeingMonitor toutes les 5 minutes. Le nom du graphique ne change jamais, de sorte que vous pouvez demander à un programme externe de surveiller ce dossier et de placer le fichier sur un site Web, si vous le souhaitez. Le nom du fichier de données enregistrées est le même à chaque fois si vous commencez à enregistrer immédiatement, et il remplacera le fichier de la nuit précédente. Lorsque vous travaillez en mode multi-nuits avec un début et une fin programmés, le nom du fichier est personnalisé avec la date, de sorte que les données de la nuit précédente ne sont pas écrasées. Le graphique affiché est toujours écrasé.
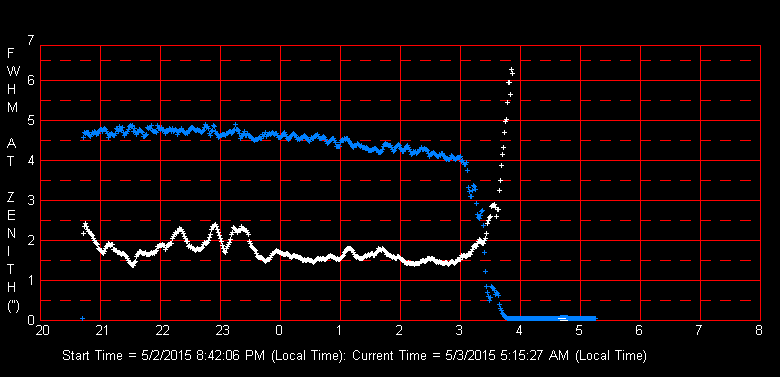
Dans le graphique de la figure 5, ci-dessus, les points de données blancs indiquent le nombre d'observations en secondes d'arc. Les points de données bleus représentent la luminosité de polaris au moment de chaque mesure. Le graphique montre que cette nuit-là, la visibilité a commencé à se dégrader vers 3 heures du matin et s'est rapidement détériorée au cours des 45 minutes suivantes, jusqu'à ce qu'il soit inutile de prendre des images. La luminosité de Polaris a également commencé à se détériorer au même moment, indiquant la présence de nuages ou de brouillard. Même en échantillonnant 100 fois par seconde, lorsque la vision est VRAIMENT mauvaise, le moniteur de vision sous-estime probablement la gravité de la situation, car l'image n'est qu'une tache bouillonnante. Bien que le moniteur de vision sous-estime ces nuits terribles, il indique clairement qu'il serait préférable de faire autre chose que de l'astro-imagerie cette nuit-là. L'utilité du moniteur de visibilité est illustrée dans la figure ci-dessous. Il s'agit d'une animation de 13 cartes prises sur une période de deux semaines. Comme vous pouvez le voir, la visibilité et les schémas de bonne et mauvaise visibilité par nuit varient considérablement, ce qui rend presque impossible de se fier à l'histoire ou à l'expérience pour prédire quand la nuit vaudra ou ne vaudra pas une heure d'effort d'exposition.
Moniteur de vision SBS SM-3






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}